Case Study Useful for In-House Production of Automated Guided Vehicles (AGVs) to Improve Productivity
| Industries | Material handling |
|---|---|
| Process and Equipment Name | Automated guided vehicle (AGV) |
| Issue | Increased productivity, labor savings, cost savings, space savings |
Issue: To Improve Productivity by Introducing AGVs That Match the Conditions of the Company's Facilities
Existing Problems/Requests
- Commercially available AGVs are not compatible with the company's facilities, adoption of AGVs has not progressed, and stalled efforts to improve productivity.
- To produce a highly practical AGV, but the time and effort required for design and assembly makes it a burden to introduce.
- It should be controlled by software that is easy to handle even for inexperienced users.
Solution: In-house AGV Equipped With the Brushless Motor BLV Series R-Type for Improved Productivity
Improving productivity is one of the key issues. In order to reduce the workload of factory staff and improve productivity, it is necessary to introduce AGVs suited to the company's needs. However, the time and effort required to design and assemble them has stalled their introduction.
Oriental Motor's brushless motor BLV Series R-type and mobile robot controller reduce the time and effort required for design and assembly, contributing to the creation of compact and lightweight AGVs.
Image of an In-House AGV Using the BLV Series R-type


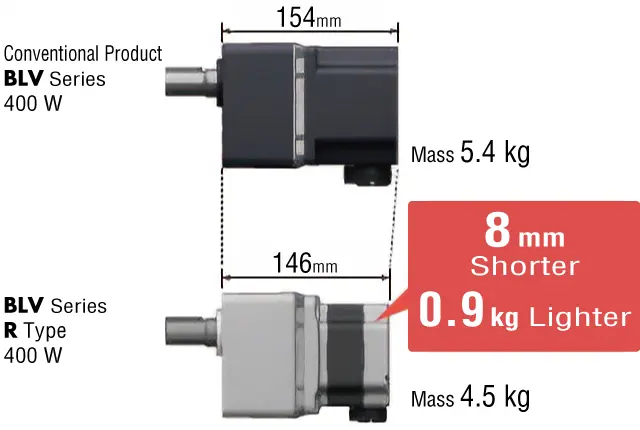
Battery-Driven, Compact, Lightweight and High-power Motor Suitable for AGVs
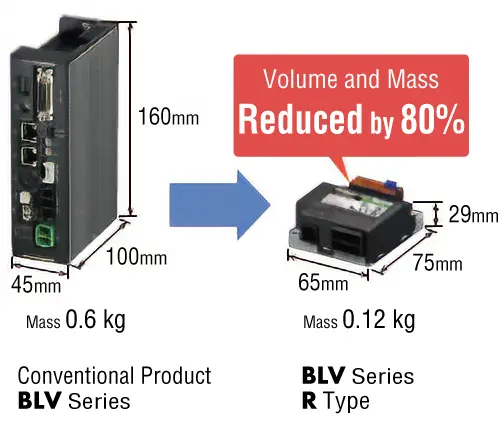
By introducing the brushless motor BLV Series R-type, you can build a compact, lightweight in-house AGVs that can be operated even in small-scale factories. The motor (parallel shaft gearhead 400 W with gear ratio 30) is 146 mm in length and with a mass of 4.5 kg, while the driver is compact and lightweight at 65 mm (width) x 75 mm (depth) x 29 mm (height) and mass of 0.12 kg. It has already been adopted as the drive source for AGVs by many customers, including AGVs manufacturers.
Motor*
Driver
The high-power motor allows for the transportation of heavy loads. The maximum transportable mass of an AGV equipped with the BLV Series R-type 400W motor is 500 kg.
[Transportation Robot Equipment Design Example]
Conditions
| BLV Series R Type Motor |
Type | Parallel shaft gearhead |
|---|---|---|
| Output Power | 400 W | |
| Gear Ratio | 30 | |
| Driving Condition | Wheel Diameter | 150 mm |
| Number of Drive Wheels | 2 | |
| Acceleration Time | 1 sec. |
Result
| Maximum Transportable Mass (Transport robot body mass + load mass) |
500 kg |
|---|---|
| Maximum Travel Speed | 0.7 m/sec |
- *Calculated using a wheel friction coefficient of 0.1.
![[Transportation Robot Equipment Design Example]](/sites/default/files/image/solutions/material-handling/02/material-handling-02_05.webp)
Mobile Robot Controller to Control AGV Motors
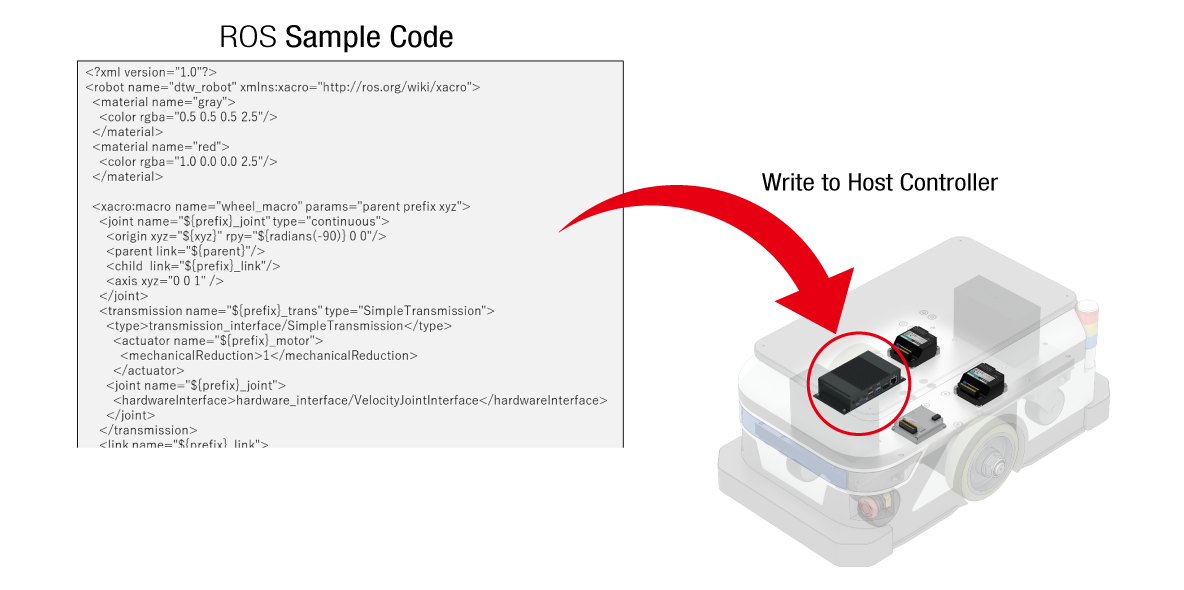
The lineup also includes robot controller convenient for driving AGVs with the brushless motor BLV Series R-type. The MVC01 is a robot controller that controls the motors of transfer robot based on commands from a host controller. Equipped with the travel control functions required for AGVs, the MVC01 operates while keeping track of its own travel coordinates.
Compared to direct control by host controllers, it can reduce the number of ROS nodes and self-written programs, contributing to a reduction in the burden of software design.

Setup is done with the free downloadable software "MVC Studio.” The MVC Studio supports the mobile robot controller MVC01 from startup to maintenance, allowing the user to set and edit various parameters and monitor various statuses.
Reliable Programming Support
We offer paid support for creating robot and motor control sample programs for users who want to control AGVs using the Robot Operating System (ROS) with a PC or Raspberry Pi, or who have some understanding of programming languages that can be used with ROS, such as Python or C++, but have no experience controlling robots or motors.
In addition to helping customers achieve their desired operation, we also provide lectures based on sample programs at the time of product delivery so that customers can customize their own products in the future.
Proposed Product: Brushless Motor BLV Series R-Type Driving Wheel Motor

Driving Wheel Motor
Motor Rated Output Power
- 100 W, 200 W, 400 W
Combinable Mobile Robot Controller
- Mobile Robot Controller MVC01
In addition to product inquiries, please contact us about any issues you may have, or to request materials and samples.
Technical Manual for Brushless Motors, Useful for Equipment Development, Now Available

For those who handle motors for mass production equipment. Technical explanations of brushless motors such as structures and control principles, as well as the advantages of using the equipment, are compiled in a single volume. This is an essential resource for equipment research, development, and design.